| Parameter Name | Range |
|---|---|
| $AX$: Average Standstill Distance - $m$ | |
| $BX_{add}$: Additive part of safety distance - $m$ | |
| $BX_{mult}$: Multiplic. part of safety distance - $m$ | |
| $BNULL_{mult}$: Calibration Parameter $m/s^2$ |
| Parameter Name | Range |
|---|---|
| $CC_0$: Standstill Distance - $m$ | |
| $CC_1$: Headway Time - $sec$ | |
| $CC_2$: Following Variation - $m$ | |
| $CC_3$: Threshold for Entering "Following" - $sec$ | |
| $CC_4$: Negative "Following" Threshold - $m/s$ | |
| $CC_5$: Positive "Following" Threshold - $m/s$ | |
| $CC_6$: Speed Dependency of Oscillation - $\frac{1}{m \cdot s}$ | |
| $CC_7$: Oscillation Acceleration - $m/s^2$ | |
| $CC_8$: Standstill Acceleration - $m/s^2$ | |
| $CC_9$: Acceleration at 80km/h - $m/s^2$ |
Notes
- Inspired by this interesting experiment, previously my understanding of application of CAV technology is to decrease gaps - to increase capacity and decrease accidents through "talking to each other"
- It's reasonably to argue the limited benefits in the real world because of the one single lane nature in this experiment
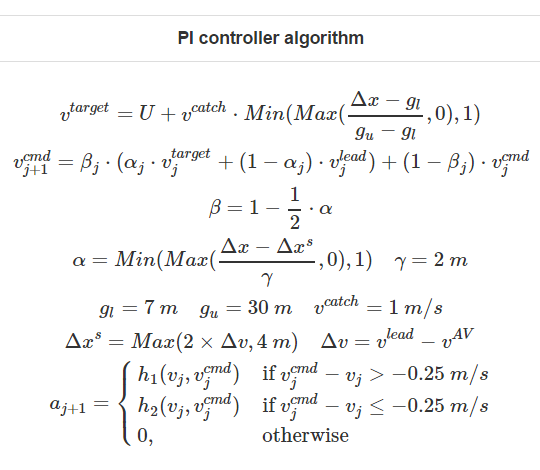
- Before I have built a web based playground to toy with Wiedemann W99 and W74, to replicate this, I only need make a certain vehicle (#2 in this case) as an autonomous vehicle using PI (proportional–integral) algorithm as described in this paper
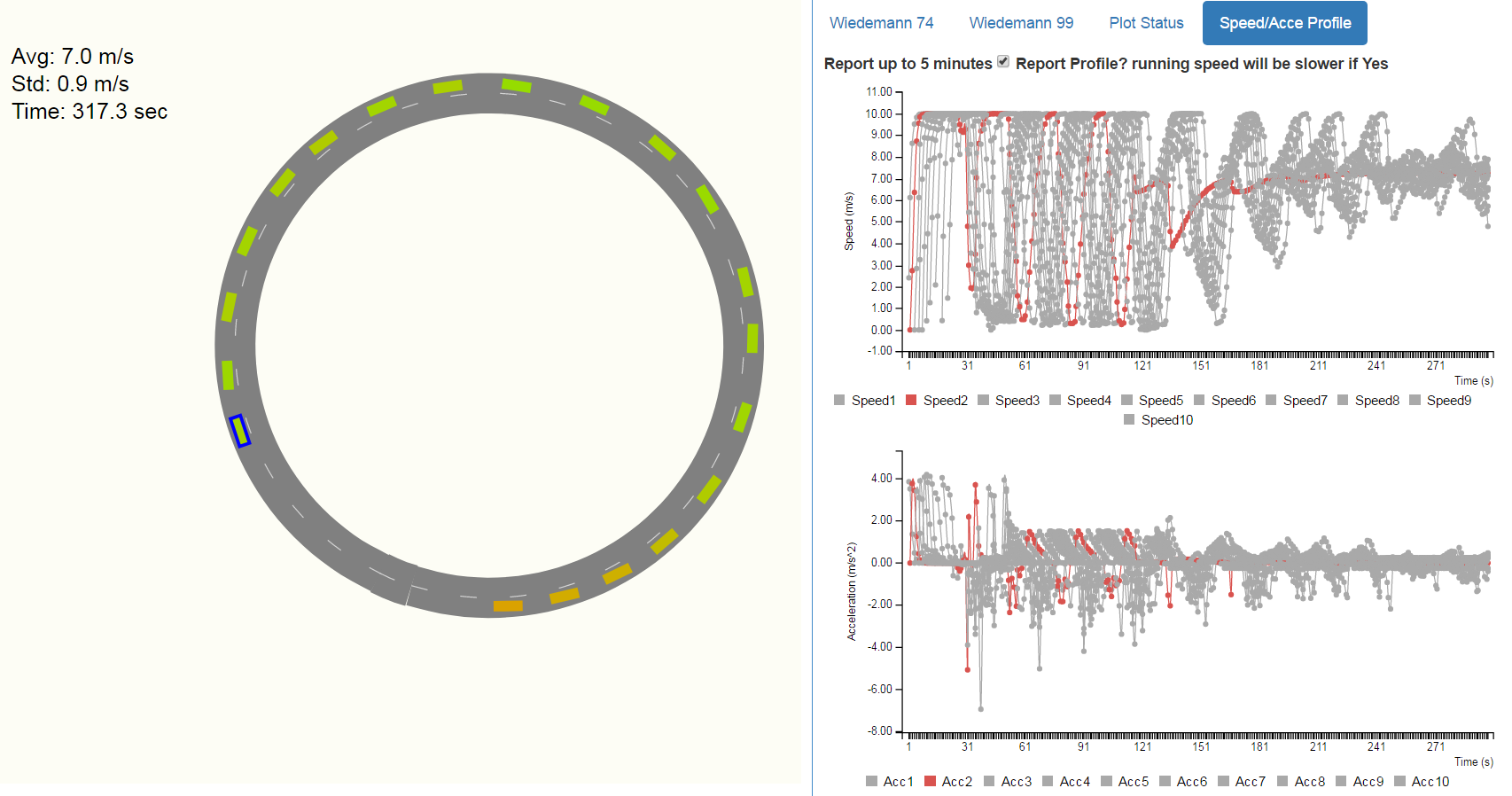
- In W77 and W94 - simulating human driver mode, the shockwave/stop-and-go waves are obvious, after enabling vehicle #2 as a controller, the speed standard deviation does decrease and at sweet spot, the traffic becomes uniform and the deviation almost disappears
Implementing Wiedemann model
- Exact difference between car-following model implemented in VISSIM and original Wiedemann's publication is not publicly known
- Some W74 parameters from Lukas Kautzsch
- Original publication formulas have problems for approaching standstill vehicles, always BX = 0, giving follower vehicles little time to react. Also be careful with other corner cases. For example, deceleration for emergency braking regime, $b_n = \frac12 \cdot \frac{DV^2}{AX-DX} + b_{n-1} + b_{min} \cdot \frac{ABX-DX}{BX}$, usually DX will be larger than AX, however for this network my vehicles pop up from inputs randomly, it might fall within AX, thus it will yield a large positive value. I adopted one similar to W99, see below
- Default deceleration for Closing-in regime, $b_n=\frac12 \cdot \frac{DV^2}{ABX-DX}+b_{n-1}$, sometimes yields positive values as well. I adopted one similar to W99, see below
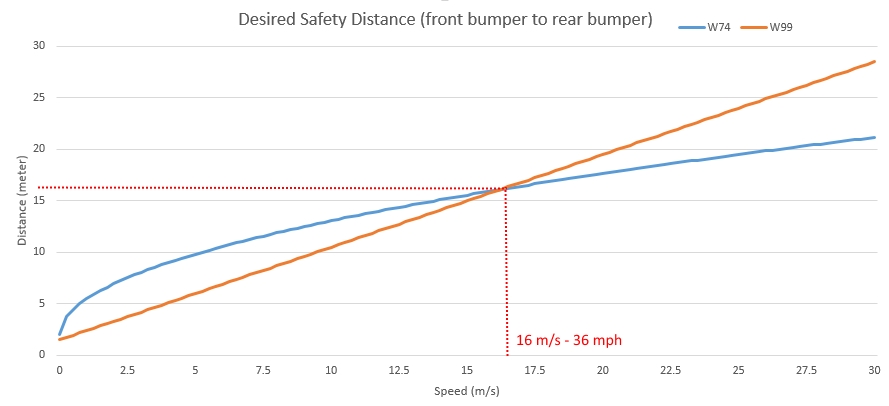
- At lower speed, W74 has larger gap - (desired safety distance), the break-even point is at 36 mph ignoring the W74 randomness. W74 has a square root relationship with the speed $D = 2 + (2 + 0.5 \cdot 3) \cdot \sqrt{V}$ while W99 has a linear relationship $D=1.5 + 0.9 \cdot V $, see figure below at default parameters
- Random seed# is fixed to 1, Drag to Pan, Scroll to Zoom in/out, Start to run simulation, Step to run single-step simulation
- Implemented in SVG, not Canvas based. W99 car status plot is from Mr. Guanghui Liu’s excellent W99 demo app with a few minor changes, its DX-DV is rotated compared to most published Wiedemann 74 plot
- The network is a real VISSIM 9 inpx input file with Link# 1 and Connector# 10000, which you can download and view the center line, the roundabout is modelled after Columbus Circle in NYC, with radius 150 feet, similar to the one in the experiment (41.4 meter)
- 20 vehicles with desired speed $10 \ m/s \approx 22.3 \ mph$ will be generated at Vehicle Input#1 at Link# 1 by negative exponential distribution
- To Do:
- Implement Lane Change Model, - Willmann and Sparmann's work are in German, which is a problem for me
- Implement Signals, Conflict area etc, - to make it a reasonably functional web-based traffic simulator
- Improve/Fine-tune W-74 especially approaching standstill vehicles
- Improve the autonomous vehicle controller algorithm
- W74 DX/DV Plot (low priority)
W74 and W99 model details

PI controller algorithm details